Гироскоп формулы. Свойства гироскопа с тремя степенями свободы. Прецессия гироскопа пол действием внешних сил. Отход от элементарной теории. Нутации
ГИРОСКОП
(от греч.
gyreuо - кружусь, вращаюсь и skopeo - смотрю, наблюдаю) - быстровращающееся
симметричное твёрдое тело, ось вращения (ось симметрии) к-рого может изменять
своё направление в пространстве. Свойствами Г. обладают вращающиеся небесные
тела, артиллерийские снаряды, роторы турбин, устанавливаемых на судах, винты
самолётов и т. п. В совр. технике Г.- осн. элемент всевозможных гироскопич.
устройств или приборов, широко применяемых для автоматич. управления движением
самолётов, судов, торпед, ракет и в ряде др. систем гироскопич. стабилизации,
для целей навигации (указатели курса, поворота, горизонта, стран света и др.),
для измерения угловых или поступат. скоростей движущихся объектов (напр., ракет)
и во мн. др. случаях (напр., при прохождении стволов штолен, строительстве метрополитенов,
при бурении скважин).
Чтобы ось Г. могла свободно
поворачиваться в пространстве, Г. обычно закрепляют в кольцах т. н. карданова
подвеса (рис. 1), в к-ром оси внутр. и внеш. колец и ось Г. пересекаются в одной
точке, наз. центром подвеса. Закреплённый в таком подвесе Г. имеет 3 степени
свободы и может совершать любой поворот около центра подвеса. Если центр тяжести
Г. совпадает с центром подвеса, Г. наз. уравновешенным, или астатическим. Изучение
законов движения Г.- задача динамики твёрдого тела.
Рис. 1. Классический карданов
подвес, а
- внешнее кольцо, б
- внутреннее кольцо, в
- ротор.

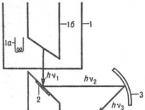
Рис. 2. Прецессия гироскопа.
Угловая скорость прецессии
направлена так, что вектор собственного кинетического момента Н
стремится к совмещению с вектором момента М
пары, действующей
на гироскоп.
Основные свойства гироскопа.
Если к оси быстровращающегося свободного Г. приложить пару сил (P - F
)с
моментом (h
- плечо силы) (рис. 2), то (против ожидания) Г. начнёт дополнительно поворачиваться
не вокруг оси х
, перпендикулярной к плоскости пары, а вокруг оси у
, лежащей в этой плоскости и перпендикулярной к собств. оси тела z. Это дополнит.
движение наз. прецессией. Прецессия Г. будет происходить по отношению к инерциалъной
системе отсчета
(к осям, направленным на неподвижные звёзды) с угловой скоростью

Рис 13. Гироскоп направления.
В ряде приборов
используется также свойство Г. равномерно прецессировать под действием постоянно
приложенных сил. Так, если посредством дополнит. груза вызвать прецессию Г.
с угловой скоростью, численно равной и противоположно направленной вертикальной
составляющей угловой скорости вращения Земли
(где U
- угловая скорость Земли,
- широта места), то ось такого Г. с той или иной степенью точности будет сохранять
неизменное направление относительно стран света. В течение неск. часов, пока
не накопится ошибка в 1-2°, такой Г., именуемый гироазимутом, или Г. направления
(рис. 13), может заменить компас (напр., на самолётах, в частности в полярной
авиации, где показания магн. компаса ненадёжны). Аналогичным Г., но со значительно
большим смещением центра тяжести от оси прецессии, можно определять поступат.
скорость объекта, движущегося в направлении оси bb
1 , с любым
ускорением (рис.
14). Если отвлечься от влияния силы тяжести, то можно считать, что на Г. действует
момент переносной
силы инерции Q
, где т
- масса Г., l
- плечо. Тогда, по
ф-ле (1), Г. будет прецессировать вокруг оси bb
1 с угловой
скоростью . После
интегрирования последнего равенства получаем
, где - нач. скорость
объекта. T. о., оказывается возможным определить скорость объекта v
в
любой момент времени по углу
, на к-рый Г. повернётся к этому моменту вокруг оси bb
1 . Для
этого прибор должен быть снабжён счётчиком оборотов и устройством, вычитающим
из полного угла поворота угол, на к-рый Г. повернётся вследствие действия на
него момента силы тяжести. Таким прибором (интегратором продольных кажущихся
ускорений) определяют скорости вертик. взлёта ракеты; при этом ракета должна
быть стабилизирована так, чтобы она не имела вращения вокруг своей оси симметрии.

Рис. 14. Гироскопический
измеритель скорости подъема ракеты. -
ускорение подъёма; g
- ускорение свободного падения; P - сила тяжести,
Q
- сила инерции,
- собственный кинетический момент.
В ряде совр. конструкций
применяют т. н. поплавковый, или интегрирующий, Г. Ротор такого Г. помещён в
кожух - поплавок, погружённый в жидкость (рис. 15). При вращении поплавка вокруг
его оси х
на Г. будет действовать момент M x
вязкого
трения, пропорциональный угловой скорости вращения
. Благодаря этому оказывается, что если Г. сообщить принудит. вращение вокруг
оси у
, то угловая скорость этого вращения
в соответствии с равенством (1) будет пропорциональна .
В результате угол поворота поплавка вокруг оси х
будет, в свою очередь,
пропорционален интегралу по времени от
(поэтому Г. и наз. интегрирующим). Дополнит. электрич. и электромеханич. устройства
позволяют или измерять этим Г. угловую скорость, или сделать его элементом стабилизирующего
устройства. В первом случае спец. электромагнитами создаётся момент относительно
оси х
, направленный против вращения поплавка; величина этого момента
регулируется так, чтобы поплавок остановился. Тогда момент M 1
как бы заменит момент M x
сил вязкого трения и, следовательно,
по ф-ле (1), угловая скорость
будет пропорциональна величине М
1 , определяемой по силе тока,
протекающего по обмоткам электромагнита. Во втором случае, при стабилизации,
напр., вокруг неподвижной оси у
, корпус интегрирующего Г. размещается
на платформе, к-рую может вращать вокруг оси у
спец. электродвигатель
(рис. 16). Для объяснения принципа стабилизации предположим, что основание,
на к-ром расположены подшипники платформы, само повернётся вокруг оси у
на
нек-рый угол .
При неработающем двигателе платформа повернётся в
этом случае вместе с основанием на тот же угол ,
а поплавок совершит поворот вокруг оси х
на угол ,
пропорциональный углу .
Если теперь двигатель будет вращать платформу в обратном направлении до тех
пор, пока поплавок не вернётся в исходное положение, то одновременно в исходное
положение вернётся и платформа. Можно непрерывно управлять двигателем так, чтобы
угол поворота поплавка сводился к нулю, тогда платформа окажется стабилизированной.
Сочетание двух поплавковых Г. в общем подвесе с аналогично управляемыми электродвигателями
приводит к стабилизации фиксированного направления, а трёх - к пространств.
стабилизации, используемой, в частности, в схемах инерциальной навигации.

Рис. 15. Поплавковый
интегрирующий гироскоп: а
- ротор гироскопа; б
- поплавок, в теле
к-рого расположен подшипник оси ротора; в
- поддерживающая жидкость;
г
- корпус; д
- стальные цапфы в камневых опорах; е
- датчик
угла поворота поплавка относительно корпуса; ж
- электромагнитное устройство,
прилагающее момент вокруг оси поплавка.

Рис. 16. Стабилизация вокруг
неподвижной оси посредством поплавкового гироскопа а
- гироскоп-поплавок;
б
- усилитель, в
- электродвигатель; г
- платформа, д
- основание.

Рис. 17. Силовая гироскопическая рама: а - собственно рама; б - гироскоп; в - спарник; г - датчик угла поворота гироскопа относительно рамы; д - усилитель сигнала датчика; е - стабилизирующий двигатель; ж - датчик момента.
В рассмотренной системе
стабилизации Г. играет роль чувствит. элемента, обнаруживающего отклонения объекта
от заданного положения, а возвращение в это положение производится электродвигателем,
получающим соответствующий сигнал. Подобные системы гироскопич. стабилизации
наз. индикаторными (стабилизаторы непрямого действия). Наряду с этим в технике
применяются системы т. н. силовой гироскопич. стабилизации (стабилизаторы прямого
действия), в к-рых
Г. непосредственно воспринимают на себя усилия, мешающие осуществлению стабилизации,
а двигатели играют вспомогат. роль, разгружая частично или полностью Г. и ограничивая
тем самым углы их прецессии. Конструктивно такие системы проще индикаторных.
Примером может служить одноосная двухгироскопич. рама (рис. 17); роторы находящихся
в раме Г. вращаются в разные стороны. Допустим, что на раму подействует сила,
стремящаяся повернуть её вокруг оси х
и сообщить угловую скорость .
Тогда, по правилу Жуковского, на кожух 1 начнёт действовать пара, стремящаяся
совместить ось ротора с осью х
. В результате Г. начнёт прецессировать
вокруг оси y
2 с нек-рой угловой скоростью .
Кожух 2
по той же причине будет прецессировать вокруг оси y
2
в противоположную сторону. Углы поворотов кожухов будут при этом одинаковы,
т. к. кожухи связаны зубчатым сцеплением. Вследствие этой прецессии на подшипники
кожуха 1
подействует новая пара, стремящаяся совместить
ось ротора с осью y
1 . Такая же пара будет действовать на подшипники
кожуха 2
. Моменты этих пар направлены противоположно
(что следует из правила Жуковского) и стабилизируют раму, т. е. удерживают её
от поворота вокруг оси х
. Однако если прецессии Г. не будут ограничены,
то, как видно из ф-лы (3), при повороте кожухов вокруг осей y
1 ,
у 2
на угол 90° стабилизация прекратится. Поэтому на оси
одного из кожухов имеется датчик, регистрирующий угол поворота кожуха относительно
рамы и управляющий двигателем стабилизации. Возникающий у двигателя вращающий
момент направлен противоположно моменту, стремящемуся повернуть раму вокруг
оси х;
вследствие этого прецессия Г. прекращается. Рассмотренная рама
стабилизирована по отношению к поворотам вокруг оси х
. Повернуть раму
вокруг любой оси, перпендикулярной х
, можно беспрепятственно, но возникающий
при этом гироскопич. момент может вызвать значит. давления на подшипники Г.
и их кожухов. Сочетание трёх таких рам с взаимно перпендикулярными осями приводит
к пространств. стабилизации (напр., искусств. спутника).
В силовых гироскопич. системах,
в отличие от свободных Г., из-за больших моментов инерции стабилизируемых масс
возникают весьма заметные колебат. движения типа нутаций. Должны быть приняты
спец. меры для того, чтобы эти колебания были затухающими, иначе в системе возникают
автоколебания. В технике применяются и др. гироскопич. приборы, принципы действия
к-рых основаны на свойствах Г.
Лит.:
Булгаков Б.
В., Прикладная теория гироскопов, 3 изд., M., 1976; Николаи E. Л., Гироскоп
в кардановом подвесе, 2 изд., M., 1964; Малеев П. И., Новые типы гироскопов,
Л., 1971; Магнус К., Гироскоп. Теория и применение, пер. с нем., M., 1974; Ишлинский
А. Ю, Ориентация, гироскопы и инерциальная навигация, M., 1976; его же, Механика
относительного движения и силы инерции, M., 1981; Климов Д. M., Харламов С.
А., Динамика гироскопа в кардановом подвесе, M., 1978; Журавлев В. Ф., Климов
Д. M., Волновой твердотельный гироскоп, M., 1985; Новиков Л. 3., Шаталов M.
Ю., Механика динамически настраиваемых гироскопов, M., 1985.
А. Ю. Ишлинский .
где r – радиус-вектор, проведенный из точки О в точку А, расположения материальной точки, p =mv – импульс материальной точки. Модуль вектора момента импульса:
где a - угол между векторами r и p , l – плечо вектора p относительно точки О. Вектор L, согласно определению векторного произведения перпендикулярен к плоскости в которой лежат векторы r и p (или v ), его направление совпадает с направлением поступательного движения правого винта при его вращении от r к p
Моментом импульса относительно оси называется скалярная величина, равная проекции на эту ось вектора момента импульса, определенного относительно произвольной точки на этой оси.
Моментом силы M материальной точки относительно точки О называется векторная величина, определяемая векторным произведением радиуса-вектора r, проведенного из точки О в точку приложения силы, на силу F : .
 |
| Рис.2. |
Модуль вектора момента силы:
где a - угол между векторами r и F , d = r*sina – плечо силы – кратчайшее расстояние между линией действия силы и точкой О. Вектор M (также как L ) - перпендикулярен к плоскости в которой лежат векторы r и F , его направление совпадает с направлением поступательного движения правого винта при его вращении от r к F по кратчайшему расстоянию, как показано на рисунке.
Моментом силы относительно оси называется скалярная величина, равная проекции на эту ось вектора момента силы M определенного относительно произвольной точки на этой оси.
Основной закон динамики вращательного движения
Для выяснения назначения приведенных выше понятий рассмотрим систему из двух материальных точек (частиц) и затем обобщим результат на систему из произвольного числа частиц (т.е. на твердое тело). Пусть на частицы с массами m 1 , m 2 , импульсы которых p 1 и p 2 , действуют внешние силы F 1 и F 2 . Частицы также взаимодействуют друг с другом внутренними силами f 12 и f 21 .
 |
| Рис.3. |
Запишем второй закон Ньютона для каждой из частиц, а также вытекающую из третьего закона Ньютона связь между внутренними силами:
Умножим векторно уравнение (1) на r 1 , а уравнение (2) – на r 2 и сложим полученные выражения:
Преобразуем левые части уравнения (4), учитывая что
 .
.
Векторы и параллельны и их векторное произведение равно нулю, поэтому можно записать
 . (5)
. (5)
Первые два слагаемых справа в (4) равны нулю, т.е.
поскольку f 21 =-f 12 , а векторr 1 -r 2 направлен по одной и той же прямой, что и вектор f 12 .
Учитывая (5)и (6) из (4) получим
![]() или
или
где L=L 1 +L 2 ; M=M 1 +M 2 . Обобщая результат на систему из n частиц, мы можем записать L=L 1 +L 2 +…+L n = M=M 1 +M 2 +M n =
Уравнение (7) является математической записью основного закона динамики вращательного движения: скорость изменения момента импульса системы равна сумме действующих на нее моментов внешних сил. Этот закон справедлив относительно любой неподвижной или движущейся с постоянной скоростью точки в инерциальной системе отсчета. Отсюда же следует закон сохранения момента импульса : если момент внешних сил M равен нулю, то момент импульса системы сохраняется (L =const).
Момент импульса абсолютно твердого тела относительно неподвижной оси.
Рассмотрим вращение абсолютно твердого тела вокруг неподвижной оси z. Твердое тело можно представить как систему из n материальных точек (частиц). При вращении некоторая рассматриваемая точка тела (обозначим ее индексом i, причем i=1…n) движется по окружности постоянного радиуса R i с линейной скоростью v i вокруг оси z (рис.4). Ее скорость v i и импульс m i v i перпендикулярны радиусу R i . Поэтому модуль момента импульса частицы тела относительно точки О, расположенной на оси вращения:
где r i – радиус- вектор, проведенный от точки О к частице.
Используя связь между линейной и угловой скоростью v i =wR i , где R i –расстояние частицы от оси вращения, получим
Проекция этого вектора на ось вращения z, т.е. момент импульса частицы тела относительно оси z будет равна:
Момент импульса твердого тела относительно оси есть сумма моментов импульсов всех частей тела:
![]()
Величина I z , равная сумме произведений масс частиц тела на квадраты их расстояний до оси z, называется моментом инерции тела относительно данной оси:
Из выражения (8) следует, что момент импульса тела не зависит от положения точки О на оси вращения, поэтому говорят о моменте импульса тела относительно некоторой оси вращения, а не относительно точки
Между формулировками основного закона вращательного движения, определениями момента импульса, силы существует схожесть с формулировками второго закона Ньютона и определениями импульса для поступательного движения.
Свободные оси и главные оси инерции тела
Для того чтобы сохранить фиксированное положение в пространстве оси вращения твердого тела, ее механически закрепляют, используя обычно подшипники, т.е. воздействуют внешними силами. Однако существуют такие оси вращения тел, которые не изменяют своей ориентации в пространстве без действия на них внешних сил. Эти оси называются свободными осями. Можно доказать, что у любого тела имеются три взаимно перпендикулярные оси, проходящие через его центр масс, которые являются свободными. Эти оси называются также главными осями инерции тела .
Гироскопы
В настоящее время гироскопами называют очень широкий класс приборов в которых используются более ста различных явлений и физических принципов. В данной лабораторной работе изучается классический гироскоп, в дальнейшем просто гироскоп.
Гироскопом (или волчком) называется массивное симметричное тело, вращающееся с большой угловой скоростью вокруг своей оси симметрии . Эту ось мы будем называть осью гироскопа. Ось гироскопа является одной из главных осей инерции (свободной осью). Момент импульса гироскопа в таком случае направлен вдоль оси и равен L =Iw .
Рассмотрим горизонтально ориентированный уравновешенный гироскоп (центр тяжести которого находится над точкой опоры). Так как момент силы тяжести для него равен нулю, то согласно закону сохранения момента импульса L =Iw= const, т.е. направление его оси вращения не изменяет положения в пространстве.
При попытке вызвать поворот оси гироскопа наблюдается явление, называемое гироскопическим эффектом . Суть эффекта: под действием силы F, приложенной к оси вращающегося гироскопа, ось гироскопа поворачивается в плоскости, перпендикулярной этой силе . Например, при действии вертикальной силы, ось гироскопа поворачивается в горизонтальной плоскости. На первый взгляд это кажется противоестественным.
Гироскопический эффект объясняется следующим образом (рис.5). Момент M силы F направлен перпендикулярно его оси, т.к. M= , r-радиус-вектор из центра масс гироскопа в точку приложения силы.
 |
| Рис.5. |
За время dt момент импульса гироскопа L получит приращение dL =M *dt (в соответствии с основным законом вращательного движения), и направленное в том же направлении, что и M и станет равным L +dL . Направление L +dL совпадает с новым направлением оси вращения гироскопа. Таким образом, ось гироскопа повернется в плоскости перпендикулярной силе F на некоторый угол dφ=|dL|/L=M*dt/L, с угловой скоростью
Угловая скорость поворота оси гироскопа W называется угловой скоростью прецессии, а такое вращательное движение оси гироскопа прецессией.
Из (9) следует
Векторы M , L , W взаимно перпендикулярны, поэтому можно записать
M=.
Эта формула получена, когда векторы M , L , W взаимно перпендикулярны, однако можно доказать, что справедлива в общей случае.
Отметим, что данные рассуждения и вывод формул справедлив в том случае, когда угловая скорость вращения гироскопа w>>W.
Из формулы (9) следует, что скорость прецессии W прямо пропорциональна M и обратно пропорциональна моменту импульса гироскопа L. Если время действия силы мало, момент импульса L достаточно велик, то скорость прецессии W будет мала. Поэтому кратковременное действие сил практически не приводит к изменению ориентации оси вращения гироскопа в пространстве. Для ее изменения следует прикладывать силы в течение длительного времени.
Практическое применение гироскопов
Описанные выше свойства гироскопа нашли себе разнообразные практические применения. Одно из первых применений свойства гироскопов нашли в нарезном оружии. После вылета из ствола орудия на снаряд действует сила сопротивления воздуха, момент которой может опрокинуть снаряд и изменить его ориентацию относительно траектории беспорядочным образом, что отрицательно влияет на дальность полета и точность попадания в цель. Винтовые нарезы в стволе орудия сообщают вылетающему снаряду быстрое вращение вокруг его оси. Снаряд превращается в гироскоп и внешний момент силы сопротивления воздуха вызывает лишь прецессию его оси вокруг направления касательной к траектории снаряда. При этом сохраняется определенная ориентация снаряда в пространстве.
Другим важным применением гироскопов являются различные гироскопические приборы: гирогоризонт, гирокомпас и т.д. Уравновешенные гироскопы также применяются для поддержания заданного направления движения самолета (автопилот). Для этого крепление гироскопа осуществляют на карданной подвеске, которая уменьшает действие внешних моментов сил, возникающих при маневре самолета. Благодаря этому ось гироскопа сохраняет свое направление в пространстве независимо от движения самолета. При отклонении направления движения самолета от направления, заданного осью гироскопа, возникают автоматические команды, возвращающие к заданному направлению.
Описанное поведение гироскопа также положено в основу прибора, называемого гироскопическим компасом (гирокомпасом). Этот прибор представляет собой гироскоп, ось которого может свободно поворачиваться в горизонтальной плоскости. Если ось гироскопа не совпадает с направлением меридиана то, благодаря вращению Земли, возникает сила стремящаяся повернуть ось в направлении перпендикулярном горизонту. Однако, благодаря гироскопическому эффекту она поворачивается в горизонтальном направлении до тех пор пока не установится направление совпадающее с меридианом, указывающее точно на север. Гироскопический компас выгодно отличается от компаса с магнитной стрелкой тем, что в его показания не надо вносить поправки на так называемое магнитное склонение (связанное с несовпадением географического и магнитного полюсов Земли), а также не надо принимать мер для компенсации воздействия магнитных наводок от корпуса и оборудования судна.
Описание экспериментальной установки
Экспериментальная установка (рис. 6) состоит из следующих основных узлов:
1. Диск гироскопа.
2. Рычаг с метрической шкалой.
3. Груз, перемещением которого по рычагу 2 задается величина момента силы.
4. Диск с угловой шкалой для определения угла поворота оси гироскопа в горизонтальной плоскости при прецессии.
5. Блок измерений и управления.

1. Определить модуль момента силы тяжести для нескольких положений груза z на рычаге гироскопа:
![]() ,
,
где m - масса груза, z р - координата груза по метрической шкале рычага, когда гироскоп уравновешен.
2. Для каждого положения груза определить время поворота оси гироскопа Δt на заданный угол Δφ и вычислить угловую скорость прецессии:
3. Вычислить величину момента импульса гироскопа для каждого из измерений:
4. Вычислить среднее значение момента импульса гироскопа:
Где N – число измерений.
5. Вычислить момент инерции гироскопа по формуле I = L/w (w -угловая скорость вращения гироскопа, w = 2pn, n - число оборотов двигателя в единицу времени) и определить абсолютную и относительную ошибки в определении момента инерции гироскопа.
Контрольные вопросы
1. Что такое момент импульса материальной точки относительно точки?
2. Основной закон динамики вращательного движения.
3. Что такое момент силы относительно точки?
4. Момент импульса абсолютно твердого тела.
5. Момент инерции твердого тела относительно данной оси.
6. Сформулируйте закон сохранения момента импульса.
7. Что такое гироскоп?
8. Что такое гироскопический эффект?
9. Что называется прецессией гироскопа и при каких условиях она наблюдается?
10. Чему равна угловая скорость прецессии?
Литература
1. Савельев И.В. Курс общей физики. Учеб. пособие. В 3-х т. Т.1 Механика. Молекулярная физика. М.: Наука. Гл.ред. физ.мат. лит., 19873. -432 с.
2. Трофимова Т.И. Курс физики. Учеб. пособие для вузов. М.: Высш. Шк., 2003. -541 с.
Рис.91
Рис.90
Рис.89
Гироскопы. Свободный гироскоп.
Изучение данных вопросов необходимо в дисциплине «Детали машин».
Гироскоп - это массивное аксиально-симметричное тело, вращающееся с большой угловой скоростью вокруг своей оси симметрии.
В этом случае моменты всех внешних сил, включая и силу тяжести, относительно центра масс гироскопа равны нулю. Это можно реализовать, например, поместив гироскоп в карданов подвес, изображенный на рис.89.
и момент импульса сохраняется:
Гироскоп ведет себя так же, как и свободнее тело вращения. В зависимости от начальных условий возможны два варианта поведения гироскопа:
1. Если гироскоп раскручен вокруг оси симметрии, то направления момента импульса и угловой скорости совпадают:
и направление оси симметрии гироскопа остается неизменным. В этом можно убедиться, поворачивая подставку, на которой расположен карданов подвес - при произвольных поворотах подставки ось гироскопа сохраняет неизменное направление в пространстве. По этой же причине волчок, "запущенный" на листе картона и подброшенный вверх (рис.90), сохраняет направление своей оси во время полета, и, падая острием на картон, продолжает устойчиво вращаться, пока не израсходуется запас его кинетической энергии.
Свободный гироскоп, раскрученный вокруг оси симметрии, обладает весьма значительной устойчивостью. Из основного уравнения моментов следует, что изменение момента импульса
Если интервал времени мал, то и мало, то есть при кратковременных воздействиях даже очень больших сил движение гироскопа изменяется незначительно. Гироскоп как бы сопротивляется попыткам изменить его момент импульса и кажется "затвердевшим".
Возьмем гироскоп конусообразной формы, опирающийся на стержень подставки в своем центре масс О (рис. 91). Если тело гироскопа не вращается, то оно находится в состоянии безразличного равновесия, и малейший толчок сдвигает его с места. Если же это тело привести в быстрое вращение вокруг своей оси, то даже сильные удары деревянным молотком не смогут сколько-нибудь значительно изменить направление оси гироскопа в пространстве. Устойчивость свободного гироскопа используется в различных технических устройствах, например, в автопилоте.
2. Если свободный гироскоп раскручен так, что вектор мгновенной угловой скорости и ось симметрии гироскопа не совпадают (как правило, это несовпадение при быстром вращении бывает незначительным), то наблюдается движение, описанное как "свободная регулярная прецессия". Применительно же к гироскопу его называют нутацией. При этом ось симметрии гироскопа, векторы и лежат в одной плоскости, которая вращается вокруг направления с угловой скоростью, равной где - момент инерции гироскопа относительно главной центральной оси, перпендикулярной оси симметрии. Эта угловая скорость (назовем ее скоростью нутации) при быстром собственном вращении гироскопа оказывается достаточно большой, и нутация воспринимается глазом как мелкое дрожание оси симметрии гироскопа.
Нутационное движение легко продемонстрировать с помощью гироскопа, показанного на рис. 91 - оно возникает при ударах молотком по стержню вращающегося вокруг своей оси гироскопа. При этом чем сильнее раскручен гироскоп, тем больше его момент импульса - тем больше скорость нутации и тем "мельче" дрожания оси фигуры. Этот опыт демонстрирует еще одну характерную особенность нутации - с течением времени она постепенно уменьшается и исчезает. Это - следствие неизбежного трения в опоре гироскопа.
Наша Земля - своего рода гироскоп, и ей тоже свойственно нутационное движение. Это связано с тем, что Земля несколько приплюснута с полюсов, в силу чего моменты инерции относительно оси симметрии и относительно оси, лежащей в экваториальной плоскости различаются. При этом а . В системе отсчета, связанной с Землей, ось вращения движется по поверхности конуса вокруг оси симметрии Земли с угловой скоростью , то есть она совершает один оборот примерно за 300 дней. На самом деле в силу, как предполагается, неабсолютной жесткости Земли, это время оказывается больше - оно составляет около 440 суток. При этом расстояние точки земной поверхности, через которую проходит ось вращении, от точки, через которую проходит ось симметрии (Северный полюс), равно всего нескольким метрам. Нутационное движение Земли не затухает - по-видимому, его поддерживают сезонные изменения, происходящие на поверхности
Рассмотрим теперь ситуацию, когда к оси гироскопа приложена сила, линия действия которой не проходит через точку закрепления. Опыты показывают, что в этом случае гироскоп ведет себя весьма необычным образом.
Если к оси шарнирно закрепленного в точке О гироскопа (рис. 92) прикрепить пружину и тянуть за нее вверх с силой , то ось гироскопа будет перемещаться не в направлении силы, а перпендикулярно к ней, вбок. Это движение называется прецессией гироскопа под действием внешней силы.
Рассмотрим ситуацию, когда к оси гироскопа приложена сила, линия действия которой не проходит через точку закрепления О.
Прецессия гироскопа - такой тип движения, когда в результате постоянного действия момента внешней силы ось свободного гироскопа вращается вокруг направления данной внешней силы.
Известно, что прецессия обеспечивает устойчивость движения. Пример прецессии - движение оси детской игрушки - юлы с заостренным
Рис. 6.5.
концом (рис. 6.5), т.е. гироскопа, имеющего одну точку опоры. Юла, раскрученная вокруг своей оси и поставленная на горизонтальную плоскость слегка наклонно, начинает прецессировать вокруг вертикальной оси под действием момента пары сил тяжести и нормальной реакции опоры: М = / х mg , где / = ОС. Конец оси гироскопа будет двигаться в направлении вектора м , который лежит в горизонтальной плоскости и направлен перпендикулярно оси юлы.
Скорость, с которой ось вращения гироскопа движется относительно вертикальной оси, называется угловой скоростью прецессии Q.
Можно доказать, что для вращающегося волчка угловая скорость прецессии не зависит от угла наклона волчка 0; она обратно пропорциональна моменту импульса волчка:

Чем быстрее вращается волчок, тем больше момент импульса и тем медленнее он прецессирует. Причем мгновенное исчезновение момента силы, например тяжести, приводит к мгновенному же исчезновению прецессии, т.е. прецессионное движение является безынерционным.
Если рассматривать качение наклонного диска, то на него будет действовать опрокидывающий момент сил тяжести и реакции опоры. Легкий диск упадет значительно быстрее, чем массивный, из-за малого значения момента импульса (скорость прецессии больше).

Рис. 6.6.
Рассмотрим случай, когда прецессия гироскопа, который движется под действием силы тяжести, сопровождается нутациями - колебаниями оси собственного вращения гироскопа вокруг вектора полного момента импульса. На рис. 6.6 показано, как в результате наложения нутаций на прецессионное движение вершина гироскопа описывает сложную траекторию с переменным углом нутации 0. Ось конуса нутации совпадает по направлению с вектором L и движется вместе с ним. Вершина конуса нутации, как и вершина конуса прецессии, находится в неподвижной точке О - точке закрепления гироскопа.
Чем быстрее вращается гироскоп, тем больше угловая скорость нутации и тем меньше ее амплитуда и период. При очень быстром вращении нутации делаются практически незаметными для глаза. Отметим, что из- за трения нутационные колебания быстро затухают и затем гироскоп совершает только прецессионное движение, когда угол 0 между векторами L ий остается постоянным. Если во время движения гироскопа нутация отсутствует и величины угловой скорости прецессии Q и угловой скорости вращения вокруг собственной оси ш постоянны, то такое движение называется регулярной прецессией (равномерной).
Впервые доказательства вращения Земли вокруг своей оси с запада на восток были получены французским физиком Ж.-Б.-Л. Фуко с помощью маятника Фуко (1851) и в экспериментах с гироскопом на кардано- вом подвесе (1852). Первый в Беларуси маятник Фуко был установлен в Белорусском государственном педагогическом университете им. Максима Танка (сентябрь 2004 г., Минск).
Свойствами гироскопов обладают вращающиеся небесные тела, винты самолетов и т.д. Области практического применения гироскопов динамично расширяются. Например, гироскопические устройства и приборы применяются в медицине, в ракетной и космической технике, для целей навигации (указатели стран света, горизонта и др.), при проведении топографических и геодезических работ, строительстве метрополитенов.
Принцип действия современных навигационных гироскопических приборов и систем основан на использовании свойств гироскопа, к которым относятся:
A. Устойчивость положения главной оси гироскопа.
Б. Прецессионное движение гироскопа (прецессия),
B. Нутационное движение гироскопа (нутация).
А Устойчивость положения главной оси гироскопа Устойчивость положения главной оси гироскопа является основным свойством гироскопа и характеризуется:
Неизменностью положения оси X свободного гироскопа относительно инерциального пространства;
Нечувствительностью гироскопа к ударам.
Для доказательства основного свойства гироскопа используют технические уравнения. Задача сводится к определению, углов γ и ψ – сферических координат положения главной оси гироскопа относительно ИСК. Для отыскания значений этих углов воспользуемся ранее выведенными формулами: и откуда
Для решения системы уравнений (14) предварительно необходимо определить законы изменения угловых скоростей q и r, для чего воспользуемся техническими уравнениями 2 и 3 системы (11). Для свободного гироскопа L y = L z = 0. Тогда уравнения 2 и 3 (11) после несложных преобразований примут вид:
Обозначив k=Н/А, и решив полученные дифференциальные уравнения (15) получим законы изменения угловγ и ψ во времени:
(16)
где: γ 0 и ψ 0 – начальные значения координат;
γ и ψ – текущие значения координат;
k – круговая частота;
kt– фаза колебаний;
q 0 и r 0 – угловые скорости движения гироскопа по углам γ 0 и ψ 0 соответственно.
Анализ системы уравнений показывает, что первое уравнение – есть закон изменения угла γ, который показывает, что при большой скорости собственного вращения гироскопа угол γ, благодаря малости второго слагаемого, остается близким к начальному значению γ 0 , поэтому можно принять
γ 0 = γ ср =const (17)
Второе уравнение системы (16) – есть закон изменения углаψ в котором ψ 0 =constи не зависит от времени. Второе слагаемое – периодическая функция от времени, характеризующая колебательный процесс и позволяющая определить величину угла отклонения оси X от её начального положения. Амплитудное значение угла очень мало, т. к. круговая частота очень велика, т.е.Н»А. На основании изложенного можно сделать вывод, что периодическая функция (второе слагаемое выражения) – есть функция времени, которая изменяет начальный угол ψ 0 , незначительно и создает вокруг него колебания с большой частотой и малой амплитудой. Эта амплитуда колебаний уменьшается с увеличением Н. Пренебрегая по малости вторым слагаемым, получим
ψ 0 = ψ ср =const (18)
Таким образом, проанализировав законы изменения углов γ и ψ, видно, что при большой угловой скорости собственного вращения гироскопа углы γ и ψ остаются близкими к их начальным значениям γ 0 и ψ 0 , т.е. главная ось X свободного гироскопа сохраняет свое положение относительно инерциального пространства неизменным с точностью до величины периодического члена.
Для доказательства основного свойства гироскопа можно воспользоваться теоремой Резаля. Это доказательство проще, но не строго объясняет основное свойство.
Для свободного гироскопа, как это следует из определения, L=0, и теорему Резаля. можно записать в следующем виде: .
Это означает, что =const, т.е. вектор кинетического момента свободного гироскопа остается постоянным по величине и направлению в инерциальном пространстве, а т.к. его направление всегда совпадает с главной осью X гироскопа, то можно считать, что главная ось свободного гироскопа сохраняет неизменным первоначально заданное направление в инерциальном пространстве . Следовательно, если глазная ось X свободного гироскопа направлена на Солнце или звезду в начальные момент времени, то в дальнейшем она все время будет указывать это направление.
Пользуясь свободным гироскопом, можно проследить суточное вращение Земли. Действительно, если главная ось свободного гироскопа сохраняет неизменным свое первоначальное направление в инерциальном пространстве, а сама Земля вращается, то наблюдатель должен увидеть, что ось X свободного гироскопа поворачивается относительно Земли. Если направить главную ось X свободного гироскопа на Солнце, то она, сохраняя направление неизменным, будет вместе с Солнцем изменять свой азимут и высоту, т.к. плоскости меридиана и горизонта вращаются в инерциальном пространстве вместе с Землей. Такое изменение положения главной оси гироскопа относительно земных плоскостей 1 называется видимым движением.
С точки зрения физики основное свойство гироскопа объясняется инерцией. Все точки вращающегося ротора имеют скорости, направленные в плоскости вращения, и по закону инерции каждая точка стремится сохранить неизменной в пространстве плоскость своего вращения. На этом основании плоскость вращения всего ротора, а следовательно, и его главная ось также сохраняют неизменными в пространстве первоначальные направления.
Вполне очевидно, что чем больше угловая скорость вращения ротора, тем большим кинетическим моментом обладает гироскоп и тем сильнее выражено его основное свойство.
Нечувствительность гироскопа к удару является положительным качествомгироскопа. Удар – это кратковременное (мгновенное) действие момента внешней силы. Доказательство этого качества гироскопа производится решением технических уравнений. Не приводя решений уравнений, напишем законы изменения углов γ и ψ гироскопа после удара:
где ω 0 – начальная угловая скорость оси X гироскопа.
Выражения (19) есть законы изменения углов γ и ψ после удара. Анализ системы уравнений показывает, что главная ось X гироскопа совершает гармонические колебания в плоскости углов γ и ψ около положения равновесия, определяемого углами:
ψ р = 0; γ р = ω 0 /k. (20)
Эти колебания имеют очень малую амплитуду и большую частоту. Практически при очень большой скорости вращения ротора гироскопа эти колебания неощутимы.
Отклонение оси X гироскопа от первоначального положения при ударе происходит только непосредственно в момент удара, и оно столь мало, что им можно пренебречь и считать;– удар практически не изменяет положения оси гироскопа в пространстве.
Б. Прецессионное движение гироскопа. Пусть на гироскоп действует внешняя сила F , как показано на рис. 7. Эта сила стремится повернуть гироскоп вокруг оси Y. Следовательно, момент внешней силы (L Y) будет действовать вокруг оси Y. Рассмотрим поведение гироскопа в этом случае. Под влиянием момента внешней силы L Y движение гироскопа определяется выражениями (12) и (13), значения q и r определяются из технических уравнений:
В нашем случае L Z = 0, и k=Н/А, отсюда уравнения (21) после несложных преобразований примут вид:
Решение дифференциальных уравнений (22)
рис.7 приводит к выражениям вида:
Система уравнений (23) характеризует законы изменения углов γ и ψ при действии на гироскоп момента внешней силы L Y
Второе уравнение системы характеризует закон изменения угла ψ и позволяет определить текущее значение этого угла на любой момент времени. Второе слагаемое характеризует изменение утла ψи представляет собой периодическую функцию. При большой скорости вращения ротора гироскопа частота колебаний главной оси X велика, а второе слагаемое в целом мало. Это означает, что угол ψ остается практически равным ψ 0 т.е. не изменяется ψ 0 = const.
Первое уравнение показывает, что угол γс течением времени изменяется. Второе слагаемое , есть произведение угловой скорости на время. Оно показывает изменение величины угла γпод действием момента внешней силы L y ; главная ось X гироскопа движется не в направлении действия силы F, а в плоскости, перпендикулярной этому направлении. Такое движение гироскопа называется прецессионным (рис.7). Третье слагаемое характеризует колебательное движение оси Z гироскопа, которое называется нутацией. При большой скорости собственного вращения гироскопа амплитуда этих колебаний, как и в законе для угла ψ, столь мала, а частота настолько велика, что колебания практически неощутимы. Фактическое движение гироскопа, оцениваемое системой уравнений (23), называется псевдорегулярной прецессией
Прецессионное и нутационное движения совершается одновременно. Главная ось гироскопа поворачивается вокруг точки подвеса 0 с угловой скоростью, равной угловой скорости прецессии и одновременно совершает нутационные колебания с большой частотой и малой амплитудой.
Угловая скорость прецессии гироскопа определяется равенством: , при ψ 0 = 0
Формула (24) выражает основной закон прецессии: угловая скорость прецессионного движения гироскопа прямо пропорциональна моменту внешних сил (L) и обратно пропорциональна кинетическому моменту Н
Прецессионное движение гироскопа объясняется и теоремой Резаля. Согласно этой теореме, линейная скорость движения конца вектора кинетического момента вращающегося гироскопа равна по величине и направлению главному моменту всех внешних сил, приложенных к гироскопу.
На рис.7 и 8 показан гироскоп, к которому приложена сила F, стремящаяся повернуть его
Рис.8 вокруг оси У. Построим вектор момента этой внешней силы Ly. Согласно принятому в механике правилу, вектор Ly должен лежать на оси, вокруг которой действует сила, и из его конца действие силы должно усматриваться против движения часовой, стрелки.
Согласно формуле (10) V = L , где V - вектор линейной скорости движения конца вектора Н. Построим у конца вектора Н вектор V так, чтобы он по величине и направлению был равен вектору Ly . Вектор V покажет нам направление и скорость движения конца вектора Н. Из рисунка видно, что конец вектора Н вместе с главной осью X гироскопа начнет совершать движение вокруг оси Z гироскопа, т.е. в плоскости, перпендикулярной направлении действия силы F. Ось, вокруг которой совершается прецессионное движение гироскопа, называется осью прецессии .
Определим угловую скорость прецессии гироскопа . Для этого достаточно определить угловую скорость одной точки гироскопа, например точки, определяющей конец вектора Н. Так как при вращательном движении точки угловая скорость её равна линейной, деленной на радиус вращения, то, как следует из рис. 8, , но V = L следовательно.
Направление вектора угловой скорости прецессии определится по известному нам правилу: из конца этого вектора прецессионное движение должно усматриваться против движения часовой стрелки.
Рассматривая рис.7 и 8, видим, что в прецессионном движении конец вектора Н стремится к концу вектора L. Конец вектора Н назовем полюсом гироскопа (ПГ), а конец вектора L – полюсом внешней силы (ПС). Для определения направления прецессии пользуются следующим правилом; в прецессионном движении полюс гироскопа стремится к полюсу силы по кратчайшему пути . Это правило называется правилом полюсов.
Правив полюсов позволяет решать следующие задачи, связанные с практикой использования навигационных гироскопических приборов и систем.
Задача 1 . Зная направление вращения ротора гироскопа (направление вектора Н) и направление действия силы F , действующей на гироскоп, можно определить направление прецессии, т.е. направление вектора .
Эта задача уже была решена при рассмотрении рис. 7, рис. 8.
Задача 2 . Зная направление вращения ротора гироскопа, т.е.Н, и направление вектора угловой скорости прецессии , можно определить направление действия силы F и момента этой силы L. Такая задача, например, решается на практике при ускоренном приведении ГК в меридиан. На рис. 9 показано положение главной оси гироскопа относительно меридиана. Требуется приложить к гироскопу такой, момент силы, чтобы его главная ось X в результате прецессии пришла в меридиан. Для определения направления вектора Ly рассуждаем так: по правилу полюсов ПГ стремится к ПС кратчайшим путем. По условию задачи гирокомпас должен прецессировать к меридиану, т.е. вектор должен быть направлен по оси прецессии Z
рис.9 вверх. Следовательно, ПС должен лежать на
оси У к западу. Положение же ПС определяет направление вектора Ly Зная Ly, легко определить направление F
Задача 3 . Зная направление действия силы F, а значит вектора L, а также направление прецессии гироскопа ()можно определить направление вращения ротора, т.е. направления вектора Н.
Такая задача может решаться при определении направления вращения ротора гироскопа гироазимута. Для этого достаточно определить положение ПГ. Чтобы определить положение ПГ, надо приложить к гироскопу произвольную силу и проследить, какой конец главной оси гироскопа прецессирует к ПС. Такая задача может быть определена при рассмотрении рис.9.
В заключение отметим, что прецессия гироскопа прекращается сразу же после прекращения действия момента внешней силе. В силу этого свойства всякие толчки и удары, которые передаются от корпуса судна на гирокомпас или гироазимут, вызывают прецессию гироскопа только в течении.своего действия, а т.к. оно кратковременно, то главная ось гироскопа практически не изменяет первоначального направления.
В Нутационное движение гироскопа Из технических уравнений для свободного гироскопа имеем:
следует, что и являются инерционными членами. Допустим, что они равны нулю, т.е. , тогда
Так как Н#0, то r = q = 0, следовательно, нутационное движение гироскопа совершается под действием инерционных сил. Нутация гироскопа носит колебательный характер. Колебания главной оси гироскопа совершаются с большой частотой и малой амплитудой.
Чем больше кинетический момент гироскопа, - тем меньше амплитуда нутационных колебаний и больше частота.